
當(dāng)今焊接行業(yè)正在經(jīng)歷多種生產(chǎn)模式,因此要求焊接機器人能夠以更強的適應(yīng)性和智能性快速響應(yīng)不斷變化的焊接環(huán)境。焊縫跟蹤是自動化焊接過程和焊接后的關(guān)鍵技術(shù)。因此,激光焊縫跟蹤傳感技術(shù)在機器人焊接中起著極其重要的作用。
最初,機器人進行焊接,必須向其展示尺寸和形狀可重復(fù)的零件,并利用高質(zhì)量的固定裝置提供可重復(fù)的定位。另外,機器人系統(tǒng)的軌跡跟蹤誤差會受到各種干擾,例如測量和建模誤差以及負載變化。為了獲得更好的焊接質(zhì)量,在機器人制造系統(tǒng)中引入激光焊縫跟蹤傳感技術(shù),已經(jīng)能夠盡量減少這些不確定影響。
在機器人制造系統(tǒng)中引入激光跟蹤可以消除示教時間,即使改變工件的狀態(tài)也可以確保質(zhì)量。顯然,激光跟蹤可以使機器人制造系統(tǒng)具有更高的效率和更好的效果。機器人焊接的激光跟蹤涉及很多方面,例如激光傳感器,圖像處理和視覺控制方法,激光傳感器作為一種非接觸式焊縫檢測傳感器,在焊縫跟蹤中起著重要的作用。

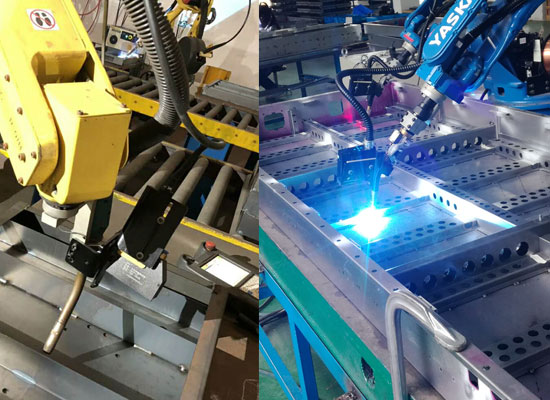
激光焊縫跟蹤傳感器主要由CCD相機、半導(dǎo)體激光器、激光保護鏡片、防飛濺擋板和風(fēng)冷裝置組成,利用光學(xué)傳播與成像原理,得到激光掃描區(qū)域內(nèi)各個點的位置信息,通過復(fù)雜的程序算法完成對常見焊縫的在線實時檢測。對于檢測范圍,檢測能力以及針對焊接過程中的常見問題都有相應(yīng)的功能設(shè)置。傳感器通常以預(yù)先設(shè)定的距離(超前)安裝在焊槍前部,因此它可以觀察焊縫傳感器本體到工件的距離,也就是安裝高度取決于所安裝的傳感器型號。當(dāng)焊槍在焊縫上方正確的定位后才能使得攝像機觀察到焊縫。
設(shè)備通過計算檢測到的焊縫與焊槍之間的偏差,輸出偏差數(shù)據(jù),由運動執(zhí)行機構(gòu)實時糾正偏差,引導(dǎo)焊槍自動焊接,從而實現(xiàn)與機器人控制系統(tǒng)實時通訊跟蹤焊縫進行焊接,就等于是給機器人裝上眼睛。手工或半自動焊接是依靠操作者肉眼的觀察和手工的調(diào)節(jié)來實現(xiàn)對焊縫的跟蹤。對于機器人或自動焊接專機等全自動化的焊接應(yīng)用,主要靠機器的編程和記憶能力、工件及其裝配的精度和一致性來保證焊槍能在工藝許可的精度范圍內(nèi)對準(zhǔn)焊縫。通常,機器的重復(fù)定位精度、編程和記憶能力等已能滿足焊接的要求。
然而,在很多情況下,工件及其裝配的精度和一致性不易滿足大型工件或大批量自動焊接生產(chǎn)的要求,其中還存在因過熱而導(dǎo)致的應(yīng)力和變形的影響。因此,一旦遇到這些情況,就需要有激光焊縫跟蹤傳感器,用來執(zhí)行類似于手工焊中人眼與手的協(xié)調(diào)跟蹤與調(diào)節(jié)的功能。
總而言之,激光焊縫跟蹤傳感技術(shù)在機器人焊接中起著極其重要的作用。










