
工件識別與抓取是生產線上工業機器人的一項重要應用,而目前生產線上多數的工業機器人是通過預先示教或者離線編程的方式來控制機器人執行預定的指令動作。一旦工作環境或目標對象發生變化,機器人不能及時適應這些變化,就會導致抓取失敗。因此,這種工作方式很大程度上限制了工業機器人的靈活性和工作效率。機器視覺技術具有快速和非接觸的特點,將機器視覺技術引入工業機器人領域,通過視覺引導機器人進行抓取、搬運等,對于提高生產線的自動化水平具有十分重要的意義。
機器視覺是一項綜合技術,包括圖像處理、機械工程技術、控制、電光源照明、光學成像、傳感器、模擬與數字視頻技術、計算機軟硬件技術(圖像增強和分析算法、圖像卡、 I/O卡等)。

創想研發了一種基于視覺相機的自動識別系統,可以準確的識別出工件位置,進行抓取。以滿足工業領域批量生產的需求,極大得提高其生產線的自動化、智能化程度。自動識別系統采用視覺傳感器將被檢測的目標轉換成圖像信號,傳送給專用的圖像處理系統,根據像素分布和亮度、顏色等信息,轉變成數字化信號,圖像處理系統對這些信號進行各種運算來抽取目標的特征,如面積、數量、位置、長度,再根據預設的允許度和其他條件輸出結果,包括尺寸、角度、個數、合格/不合格、有/無等,實現自動識別功能。
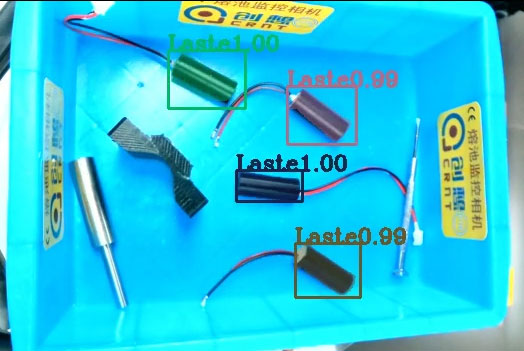
創想使用視覺相機對工件進行采圖,得到了原始圖像后,對圖像進行二值化、圖像分辨率更改以適應顯示器等操作。預處理完成后,利用已訓練完成的文件進行工件的識別,并對識別結果進行控制。實驗證明,該系統具有較高的定位精度,程序運行可靠穩定,滿足工業生產的要求,對于提高生產線的自動化水平具有重要意義。











