
由于機器人焊接的特殊性和復雜性,目前國內(nèi)外實際焊接生產(chǎn)使用的機器人,總的來說絕大多數(shù)還是“示教-再現(xiàn)”型的“盲人”機器人,這種類型的機器人對于焊接環(huán)境的一致性要求異常嚴格,其焊接路徑和相關參數(shù)都是需要預先設置的。
但是在實際的焊接中常常因為存在變形、變散熱、變間隙、變錯邊、工件加工誤差和裝配誤差等因素造成焊縫位置和尺寸的變化,導致焊縫和示教軌跡有偏差。要讓機器人模擬熟練焊工進行智能化焊接,就必須給“盲人”機器人安裝“眼睛”和“大腦”,其中機器人的“眼睛”就是視覺傳感系統(tǒng),“大腦”就是機器人跟蹤控制系統(tǒng),讓機器人能夠自主導引、尋找初始焊位并對焊接過程進行實時焊縫跟蹤控制。

激光跟蹤機器人自適應焊接系統(tǒng)主要由:機器人、操作裝置(機器人示教盒)、探測頭(激光器)、探測頭處理器(激光器控制器)、計算機5大部分組成:
機器人:系統(tǒng)中主要焊接設備,焊槍與激光器都安裝在機器人上,由機器人“拿著”焊槍在工件上焊接;
操作裝置(機器人示教盒):用于編輯機器人的焊接程序;
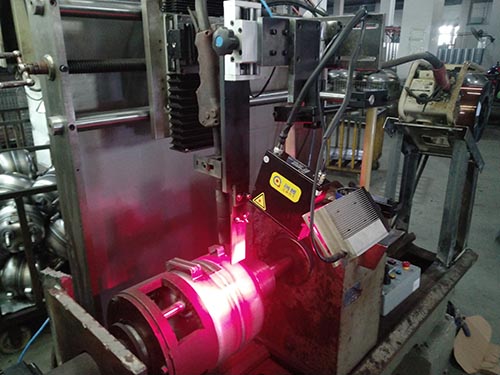
探測頭(激光器):安裝于機器人上,用于識別焊縫位置,母材間間隙大小;
探測頭處理器(激光器控制器):將激光器傳回的焊縫位置數(shù)據(jù)處理后輸送給機器人。機器人根據(jù)焊縫位置數(shù)據(jù)來進行焊接;
計算機:用于設定工件的尺寸及坡口類型,也可以實時的查看當前的跟蹤信息
應用:焊接技術在機器制造、造船工業(yè)、建筑工程、電力設備生產(chǎn)、航空及航天工業(yè)等應用十分廣泛。










