
專用車廂板在運行中承受著復雜的作用載荷,在使用中對結構牢固性有極高的要求,由于車廂板主要的加工工藝為焊接,因而,對焊接質量有極高的要求。
隨著工業自動化的發展,車體墻板結構采用自動化焊接的比例逐年提升,逐漸取代生產環境差、勞動強度高、生產效率低的人工焊接。自動化焊接工作站的工業機器人通常采用“示教再現”的工作模式,在機器人焊接過程中,它們可以在其工作空間內高精度重復已經示教的動作。但這樣的工作方式也存在一定的局限性,那就是機器人的應變能力差,對工件的裝配精度要求嚴格,母材的一致性要好。焊接條件基本穩定,機器人才能夠保證焊接質量。
以車廂板為代表的鋼結構領域的自動化焊接,往往伴隨著下述痛點:
1.母件體型較大,往往伴隨著工裝及組對精度差的問題,導致焊接接頭的一致性難以保證,需要反復示教機器人,費時費力。
2.電弧焊的高熱量輸入,易引起母件過熱產生應力和變形,導致工件發生變形。
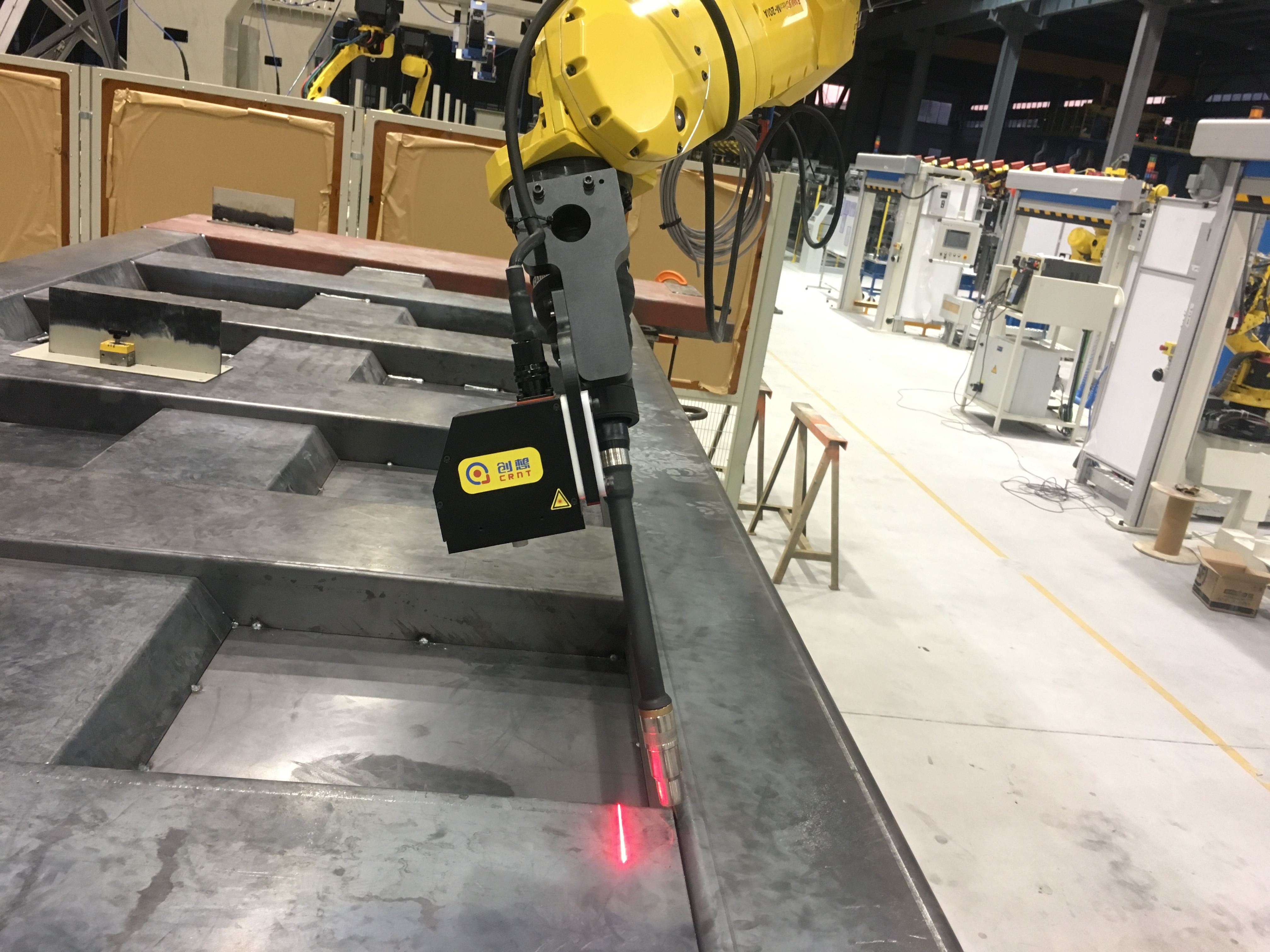
創想激光視覺焊縫跟蹤系統,與工業機器人配套后,能夠在焊接時自動檢測和自動調整焊槍的位置(類似機器人的眼睛與大腦),使焊槍始終沿著焊縫進行焊接,同時始終保持焊槍與工件之間的距離恒定不變,有效改善焊接質量,提高生產效率。










