
01、扇葉掃描系統優點
本系統主要用于(軸流-離心)風扇扇葉焊接所出的解決方案,相比之前使用尋位跟蹤功能去焊接,有以下優勢
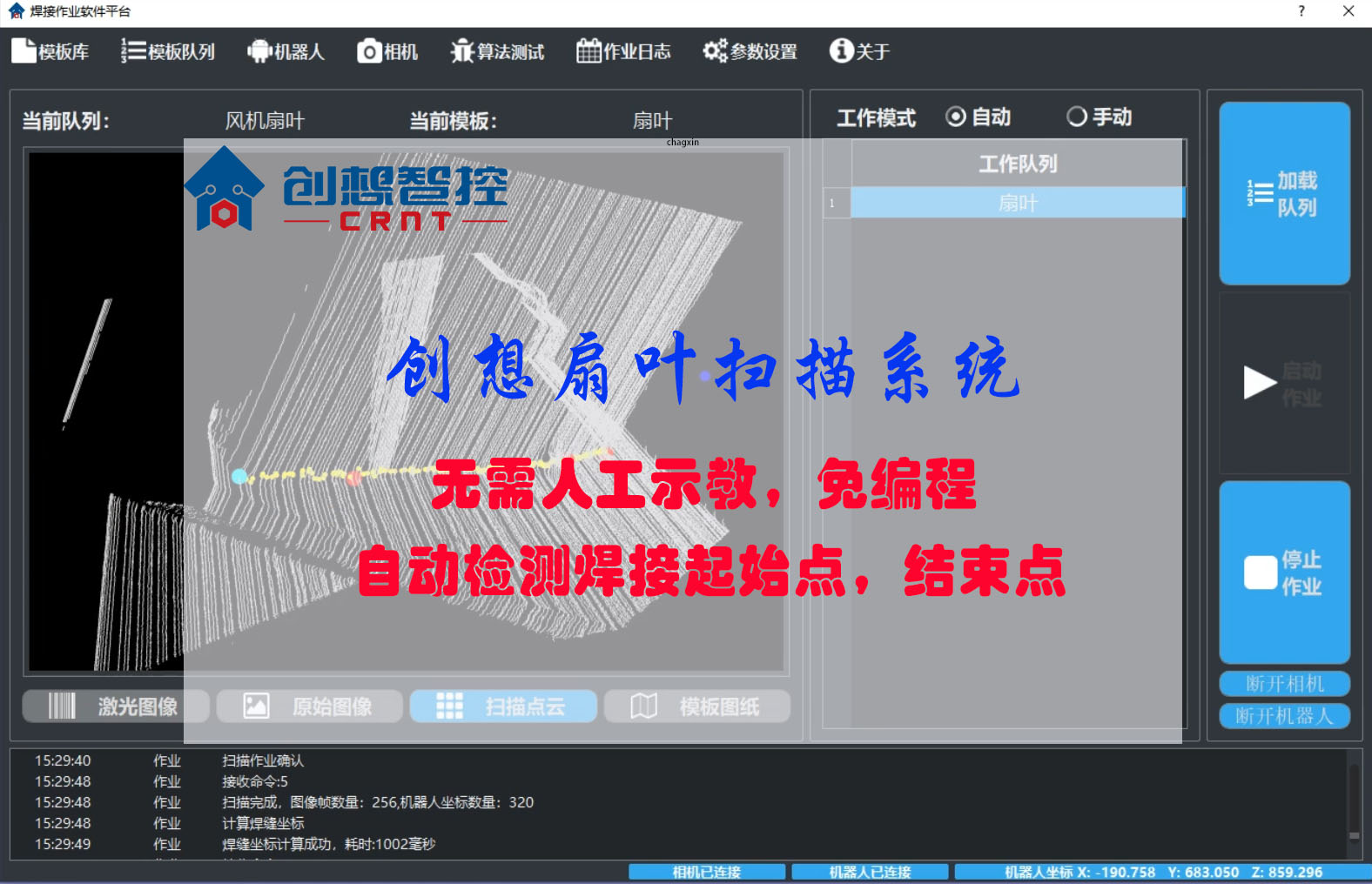
1、無示教,免編程,操作簡單容易上手;
2、自動檢測焊接起始點、結束點,實現滿焊;
3、可實時查看3D掃描圖像;
4、軸心式、離心式風機通用;
5、可通過偏移實現兩面焊接;
6、不用考慮弧光的影響。
02、扇葉掃描系統解決的難題

風扇主要分為軸流和離心兩種,隨著工業產品的不斷升級和高新科技產業的快速發展,離心風扇和軸流風扇在工業產品上的散熱應用越來越廣泛,離心式風扇原理:氣流軸向流入旋轉葉道,在離心力作用下被拋向葉輪外緣,從出風口排出。軸流風扇原理:氣體軸向進入旋轉葉道被加壓后再從另一面軸向排出。
風扇的大量應用,讓風扇焊接自動化加快了進程,但是采用主流的尋位跟蹤焊接效率或質量并不盡如人意,如果采用尋位的方式,受扇葉弧度的影響,可能需要尋多個點位才可實行焊接,尋位焊接時間的周期,也會有比較長。如果采用跟蹤的方式,不好示教調試干涉較多,存在焊點跟蹤也不太穩定,他的一個焊接周期和最終一個效果,并不能達到客戶要求。
03、扇葉掃描系統介紹
扇葉掃描主要基于研華寶元系統機器人,可以對軸流式-離心式扇葉進行掃描自動焊接。機器人配合高距離傳感器,掃描出整條焊縫點云數據,再上傳到工控機軟件上,進行焊縫軌跡計算識別,并輸出六個點位到機器人實行焊接,控制變位機可進行循環掃描焊接。
使用時主要需要對機器人示教掃描點位,并建立通訊后,即可直接自動運行程序連接上位機直接掃描焊接。

04、扇葉掃描系統使用流程
1、機器人和傳感器通訊設置
2、機器人和傳感器標定
3、導入程序模板,并設置參數
4、設置示教程序點位
5、自動運行程序,等待上位機啟動指令
6、選擇風扇模板焊縫
7、點擊連接機器人和傳感器
8、設置圖像
9、其他設置-六點偏移
10、其他設置-雙面焊接扇葉寬度輸入
11、點擊“啟動作業按鈕”










